Windsor Automotive Reference Model
 Max Varney
Martin A Passmore ✉
Max Varney
Martin A Passmore ✉
Affiliation : Aeronautical and Automotive Engineering, Loughborough University, UK
✉ m.a.passmore@lboro.ac.uk; admin@nwtf.ac.uk
Introduction
Carbon dioxide (CO2) plays a significant role in climate change, with passenger vehicles responsible for 12% of CO2 emissions in the European Union. The emission from the Vehicles are directly influenced by aerodynamic drag.This relationship has led to stricter emissions legislation, which is now crucial for manufacturers' competitiveness. Lower drag improves vehicle efficiency and range, benefiting the end user regardless of the powertrain type. Jaguar Land Rover, the sponsor for this work, recognise the impact of legislation on their vehicles and the impact of their vehicles on the environment.
Therefore, measurements have been conducted with a specific focus on square back geometries due to their widespread popularity and relevance to the sponsor of this work. The Windsor model, as developed by Steve Windsor of Jaguar Land Rover, is used here has been modified to include a second version with wheels. Further details are given in the paper by Pavia et al. (2020)[1] and Varney (2019)[2]. This model is a good representation of real vehicles (hatchbacks, estate backs or SUVs) without too much simplification such as the Ahmed model.
Two configurations of Windsor model are considered for extensive measurements (a) model with no wheels; (b) model with (stationary) wheels. The measurements involve large-scale tomographic Particle Image Velocimetry (PIV), Pressure tappings, and force balance. The full dataset is available from the Loughborough University repository.
Model Geometry
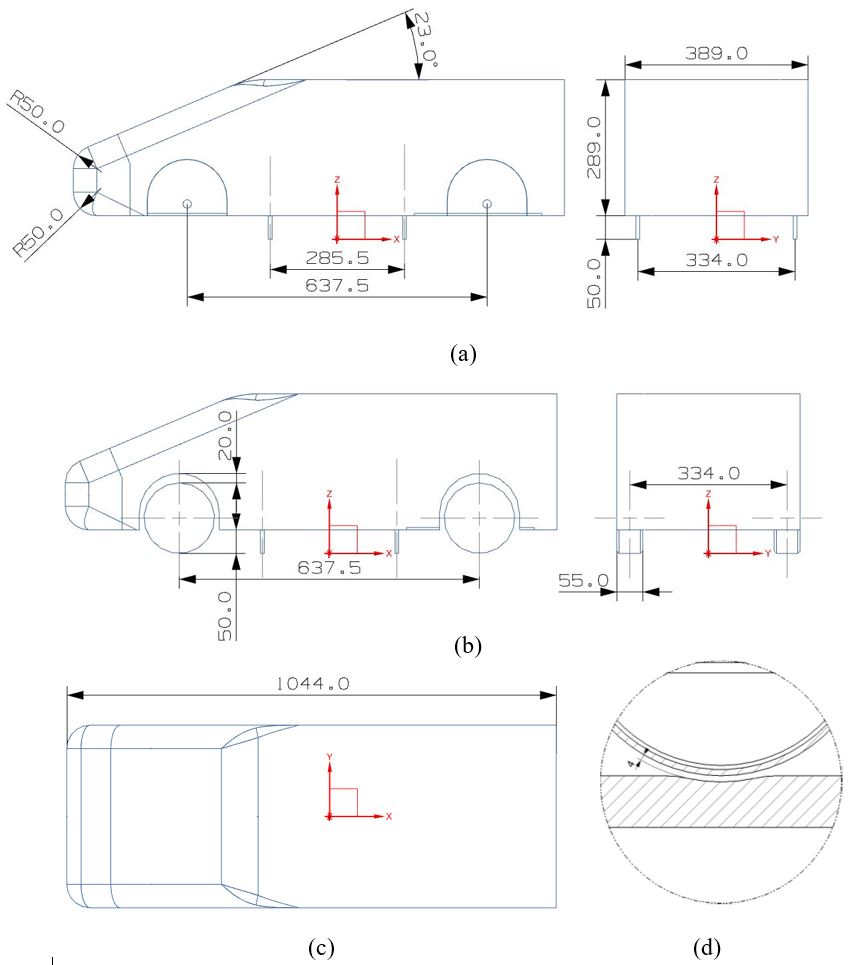
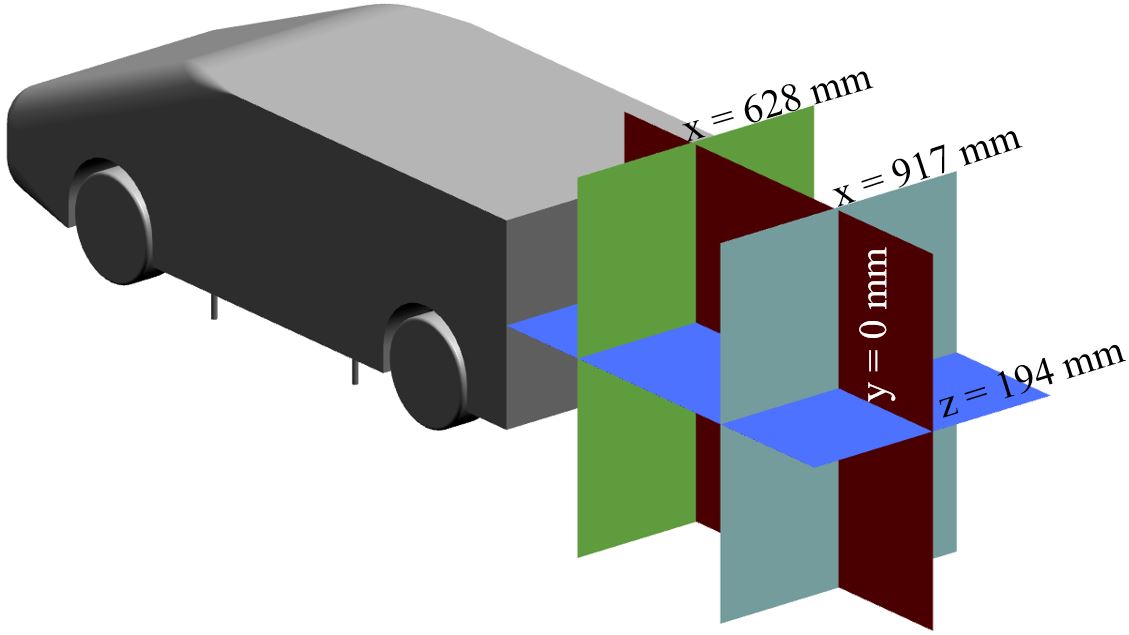
The geometry used in the wind tunnel was a 1/4 scale model with a length of 1044 mm, a width of 389 mm and a height (excluding pins) of 289 mm. The schematic of the model and the reference coordinate system is shown in figure 1. The reference frontal area is defined by the vehicle height and width and rounded to be 0.112 m2. The reference length used for pitching moment is the wheelbase 0.6375 m.
The CAD geometry of the model has its origin on the ground plane, in the symmetry plane midway between the wheels. The coordinate system has x in the streamwise direction (hence the nose is negative x), z upwards and hence positive y is towards the right of the vehicle. The nose of the vehicle is at x=-0.56075 m, the rear at x=0.4835 m. The sides of the car are at y=±\pm0.1945 m, the car underbody at z=0.05 m and the car roof at z=0.339 m.
The model is mounted in the wind tunnel with four pins at a ground clearance of 50 mm and zero pitch are included in the integration of the force coefficients. The external diameter of the wheel was 150 mm and its width was 55 mm. The wheels are stationary and attached to the vehicle. Typically models with wheels flatten the bottom of the wheel to represent the contact patch, but with a small amount of clearance to prevent the model grounding with the tunnel floor. This version of the model was initially designed to have rotating wheels, but here they have been hard mounted to the model body and to prevent grounding of the model, a pad beneath each wheel is recessed to maintain a ≈\approx 4mm gap between the wheel and the floor, as shown in Figure 1d.
The experimental wind tunnel has a 3.2 m long working section with a 1.92 m wide x 1.32 m high cross section expanding to 1.94 m wide x 1.32 m high at the end of the section. There is no moving ground plane and so boundary layers grow along the walls. Experimental measurements at the centre of the working section quote a boundary layer thickness of 60mm, displacement thickness of 9.4 mm and momentum thickness of 5.5 mm. The maximum turbulence intensity was measured to be approximately 3% at the edge of the boundary layer.
Measurement Locations and Techniques
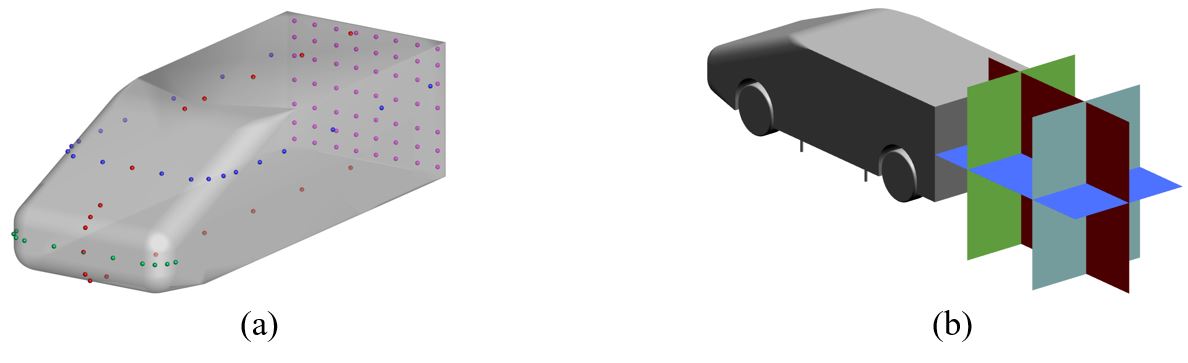
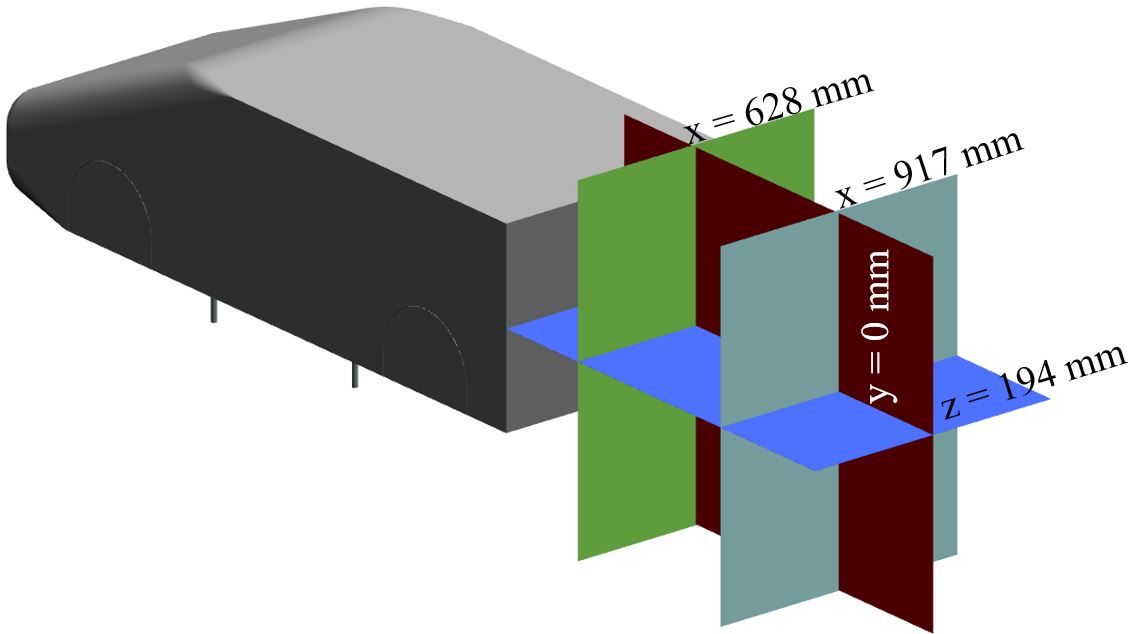
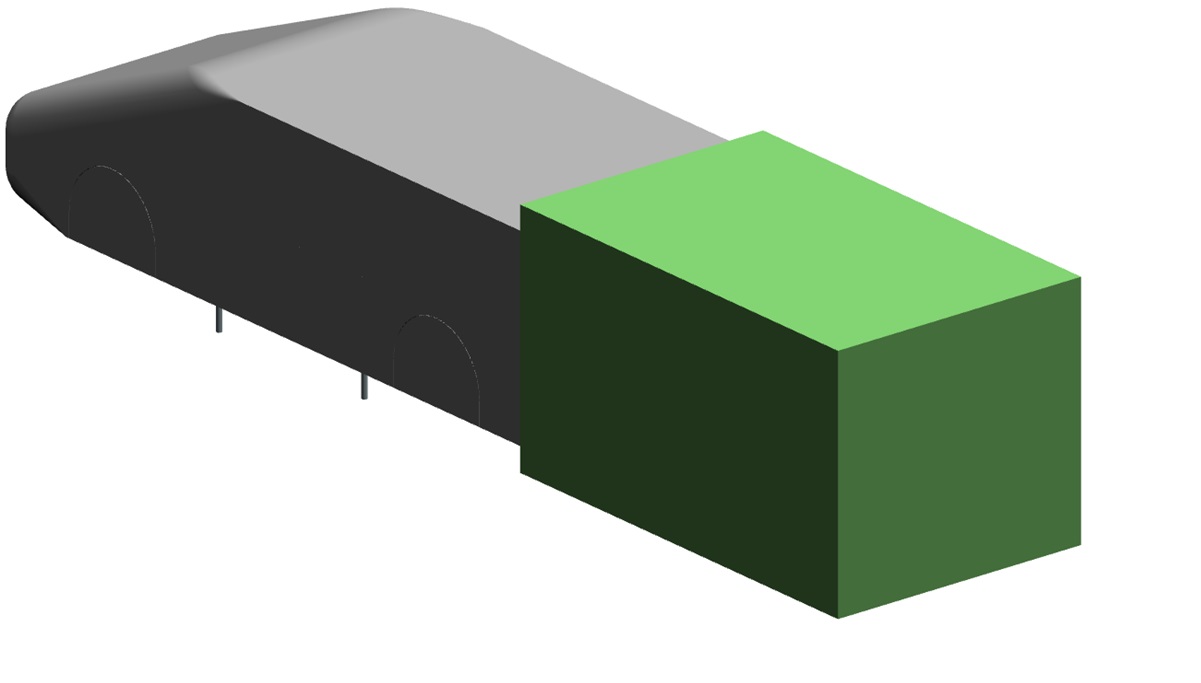
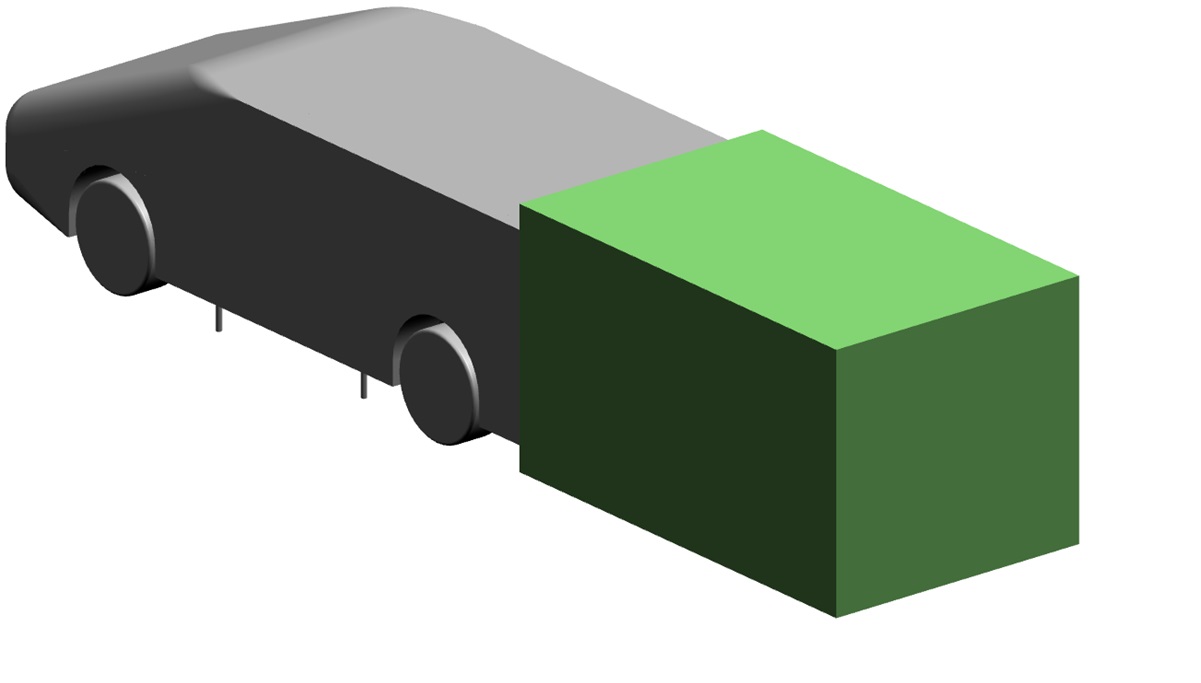
Tomographic PIV was employed to characterise the 3-D topology of the near-wake region. A volumetric field of view measuring 560 mm x 590 mm x 440 mm was considered. Further 2D PIV measurements have been conducted at several planes, x = 628 mm, x = 917 mm, y = 0 mm, and z = 194 mm.
Experimental Facility
The experiments were carried out in the Loughborough University large wind tunnel. This is an open circuit wind tunnel, with a test section of 1.92 m X 1.32 m X 3.6 m (W X H X L ). The resulting blockage ratio was between 4.4% and 4.7%, depending on the model configuration (with no wheels or with wheels).
Flow Conditions
Inlet velocity = 30 m/s (for Tomo PIV)
Inlet velocity = 40 m/s (for 2D PIV)
Reynolds number for 2D PIV = 2.9 X 106 (based on model length).
Reynolds number for Tomo PIV = 5.78 X 105 (based on model height).
Free-stream turbulence ≈\approx 0.2 % (in empty condition)
Flow uniformity = ±\pm0.4%
Wind Tunnel Corrections
No corrections have been made to the data.
Note that the data in the Varney thesis[2] is for corrected force coefficients – that is accounting for the wind tunnel blockage to present data appropriate to a vehicle in free air.
CAD models
The reference model geometry is given in two different formats,
| Windsor model – No wheel.stp | Windsor model – No wheel.stl |
|---|
| Windsor model – with wheel.stp | Windsor model – with wheel.stl |
|---|
Available Datasets
(i) No Wheel case – planar PIV
| Mean flow field (for various yaw angles) |
|||
|---|---|---|---|
| 0° | 2.5° | 5° | 10° |
| x = 628.csv x = 917.csv |
– | – | – |
| y = 0.csv | – | – | – |
| z = 194.csv | z = 194.csv | z = 194.csv | z = 194.csv |
| Instantaneous flow field (for various yaw angles) |
|||
|---|---|---|---|
| 0° | 2.5° | 5° | 10° |
| x = 628.csv x = 917.csv |
– | – | – |
| y = 0.csv | – | – | – |
| z = 194.csv | z = 194.csv | z = 194.csv | z = 194.csv |
(ii) No Wheel case – Tomographic PIV
(iii) No Wheel case – Force measurement
(iv) No Wheel case – Pressure measurement
(vi) Wheel case – planar PIV
| Mean flow field (for various yaw angles) |
|||
|---|---|---|---|
| 0° | 2.5° | 5° | 10° |
| x = 628.csv x = 917.csv | – | – | – |
| y = 0.csv | – | – | – |
| z = 194.csv | z = 194.csv | z = 194.csv | z = 194.csv |
| Instantaneous flow field (for various yaw angles) |
|||
|---|---|---|---|
| 0° | 2.5° | 5° | 10° |
| x = 628.csv x = 917.csv | – | – | – |
| y = 0.csv | – | – | – |
| z = 194.csv | z = 194.csv | z = 194.csv | z = 194.csv |
(vii) Wheel case – Tomographic PIV
(viii) Wheel case – Force measurement
(IX) Wheel case – Pressure measurement
Open Access
This metadata is provided under the Creative Commons Attribution-NonCommercial 4.0 International License https://creativecommons.org/licenses/by-nc/4.0/). This license allows for unrestricted use, distribution, and reproduction in any medium, provided that proper credit is given to the original author(s) and the source. Also provide a link to the license, and indicate if any changes were made. Furthermore, this license does not allow the use of this material for commercial purposes.
Acknowledgments
The NWTF acknowledge the support for the metadata work from the EPSRC Network Grant, EP/X011836/1.